波士顿动力一直以惊艳的足式机器人闻名。其双足机器人产品Atlas甚至成为DARPA机器人挑战赛的标准平台之一
波士顿动力一直以惊艳的足式机器人闻名。其双足机器人产品Atlas甚至成为DARPA机器人挑战赛的标准平台之一。
在比赛中获得前三名的机器人,有两台都并非使用足式结构,而是在足部安装了轮子或履带:


这样的好处显而易见:在平坦的地面上可以轻松达到更高的速度和更好的稳定性。但代价是丧失了跨越障碍的能力---
真的吗?
波士顿动力的这款名为Handle的机器人,把足+轮式的能力直接拔升到了一个闻所未闻的高度。用冰冷的事实告诉我们,不是轮子越障能力不够好,而是你们的工程师不够diao。
视频在此:(站搜网移动客户端用户若无法观看视频,请点此查看)
正如BD官方视频介绍中说的那样:
“Wheels are efficient on flat surfaces while legs can go almost anywhere: by combining wheels and legs Handle can have the best of both worlds.“
如果轮+足的结构这么好,为什么以前没人做过?很大程度是因为这件事在工程上太难了。
难点一:柔性控制
Handle的足部关节不论是在面临突然出现的斜坡还是承受落地的冲击时都表现出了很好的柔性,这对系统稳定性非常关键。如果关节使用简单的位置或速度控制,机器人在高速遇到未知的接触面时会瞬时产生巨大的冲击力,不仅难以控制,甚至容易损坏机器人本体。

Handle在斜坡上如履平地
难点二:大扰动下的非线性系统控制
为了承受如此大的外部扰动,用传统的简单线性倒立摆建模是显然不够的,机器人需要动用全身所有的关节,所有的运动资源来维持平衡。
比如我们可以注意到Handle转弯时并不是简单地让轮子差速转动,而是像溜旱冰一样加入了身体的自然侧倾:

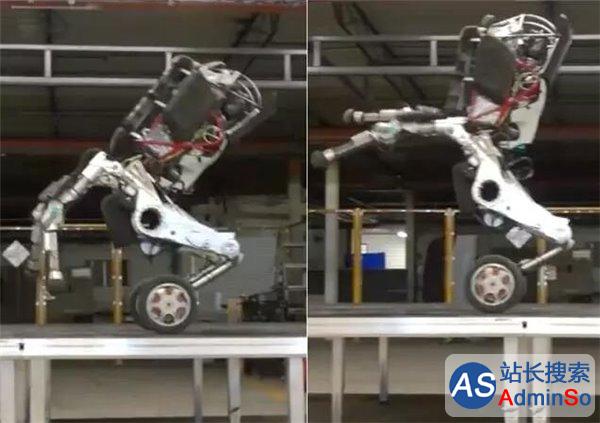
再比如跳上桌子瞬时的手臂摆动。
这样的一个机器人的全身动力学模型是高度非线性的,其实时平衡控制解算本身就是一个挑战,更不要说需要考虑在大量扰动/不确定性存在时的稳定性了。
难点三:混合控制(Hybrid control)
只用一个连续模型是没法做”跳跃“这种动作的。机器人同时拥有连续(关节角度、速度)和离散(与地面的接触面位置、数目)的状态,这属于混合控制“Hybrid Control”的研究范畴。甚至视频中“双手举起100磅重物”这个任务,也需要把重物作为模型的一部分来做控制,因为如果只把重物当扰动的话,这扰动也太大了。

Hybrid Control这个学科本身就还不是很成熟(相对于其他多数控制理论而言),其前十几年的研究和成果都集中在混合线性系统上。对于Handle这种非线性混合系统,学术界的成果很多都还停留在“证明一个稳定的控制器是否存在”这个层面,近些年也有了很多“给定一个控制器,分析其稳定性”的方法。但对于“给定问题如何设计一个控制器”,还并不是很完善。
难点四:硬件本身
回到机器人Handle本身。官方介绍它身高1.98米,纵跳1.2m。这特么是乔丹的身高+内特.罗宾逊的弹跳啊。Handle的轮子可以以14Km/h的速度前进。整个机器人由电池供能,驱动电机和液压泵。无需外接设备,一次充电续航24千米。

我还能说什么。我们这边一个搞双足行走教授看完视频后的反应是一句话:
Biped walking is DONE!
(双足行走这一行没法干了!)
标签: 身高 1.98m 纵跳 1.2m 不是 乔丹 这是 波士顿 动力
声明:本文内容来源自网络,文字、图片等素材版权属于原作者,平台转载素材出于传递更多信息,文章内容仅供参考与学习,切勿作为商业目的使用。如果侵害了您的合法权益,请您及时与我们联系,我们会在第一时间进行处理!我们尊重版权,也致力于保护版权,站搜网感谢您的分享!